
Esta Chuleta Escornabótica permite xogar coa configuración dos valores do escornabot para adaptalos ás nosas necesidades definindo avances e xiros.
IMPORTANTE: Ter instalado o Arduino IDE e o Firmware (código) de Escornabot. Aquí se indica o proceso: https://www.roboteach.es/escornabot-firmware/
Configuración de valores: avances e xiros
Por defecto o Firmware do Escornabot inclúe un avance de 10cm e un xiro de 90º. Se esta configuración non se adapta ao traballo que queredes realizar, podedes cambiar estes valores. Aquí tedes como facelo:
- Entrar na carpeta do código “escornabot-firmware-DIY-stable”
- Entrar na carpeta Escornabot
- Abrir/Clicar en “Escornabot.ino”

- Abrirase o código do Escornabot no Arduino
- Colocarse na pestana “Configuration.h”

- Unha vez en Configuration.h buscar as seguintes liñas: (cara a parte medio-baixa da páxina)

- Para cambiar distancia de avance:
- Modificar o valor 100 mm (10cm) pola distancia que desexemos en mm.
- #define MOVE_DISTANCE_DEFAULT 100.0f //mm
- Para cambiar os graos de xiro:
- Modificar o valor de 90 (º) polo ángulo de xiro que desexemos, en graos.
- #define TURN_DEGREES_DEFAULT 90.0f //°
Configuración de modos
Por defecto o código do Escornabot ben con 3 Modos activados. Cada un destes modos contén diferentes funcionalidades segundo as pulsacións (“estándar” ou prolongadas) nos 5 botóns da botoeira. Podemos activar ou desactivar algúns destes modos. Para iso temos que:
- Entrar na carpeta do código “escornabot-firmware-DIY-stable”
- Entrar na carpeta Escornabot
- Abrir/Clicar en “Escornabot.ino”

- Abrirase o código do Escornabot no Arduino
- Colocarse na pestana “Configuration.h”
- Unha vez en Configuration.h buscar as seguintes liñas: (ao inicio da páxina)
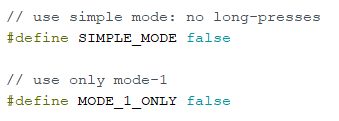
- MODO SIMPLE: Modo que unicamente contén Avance de 10cm (diante-atrás) e Xiro de 90º (dereira-esquerda). NON ten pulsacións prolongadas que activen outras funcionalidades (pausa, modos, xiros con diferentes ángulos). [Pode ser útil para quen se estea iniciando ou para persoas con dificultades motoras].
- Para activar o Modo Simple:
- Modificar “false” por “true”

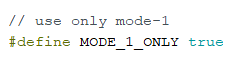
- SO MODO 1: Modo que unicamente contén as funcionalidades do Modo 1: avance de 10cm (diante-atrás), xiro de 90º (dereita-esquerda), xiro de 45º (dereita-esquerda) e pausa. NON ten as funcionalidades do Modo 2 e 3.
- Para activar So o Modo 1:
- Modificar “false” por “true”
Configuración Automática do Teclado
Unha vez introducido o código, podemos fixar de xeito “automático” os valores dos botóns do teclado sen necesidade de realizar un test de botoeira e sen ter que apuntar valores nin introducilos no código. Para elo:
- Pulsamos a tecla central do teclado do Escornabot (e a mantemos pulsada)
- Encedemos Escornabot (a tecla central -GO- segue pulsada)
- O Escornabot comeza a pitar (soltamos a tecla central -GO-)
- Cando remata a secuencia de pitidos introducimos a seguinte secuencia de pulsacións/comandos para fixar os valores do teclado:
- Botón Adiante
- Botón Esquerda
- Botón Central -GO-
- Botón Dereita
- Botón Atrás
- Comprobamos o funcionamento do Escornabot
Ollo!!! Se os MOTORES (STEPPERS) están invertidos: Adiante funcionará como atrás e atrás como adiante.
Neste caso a secuencia que debemos marcar tras escoitar os pitidos de encedido comentados é:
- Botón Atrás
- Botón Dereita
- Botón Central -GO-
- Botón Esquerda
- Botón Adiante
Neste caso, a funcionalidade de PAUSA estará no botón ADIANTE, en lugar de ATRÁS, pois os comandos están invertidos.
*Nome da sección tomado do proxecto orixinal: https://youtu.be/wN8WF5jdgVU